Introduction to Autonomous Driving Algorithms
Defining Autonomous Driving
Autonomous driving, often referred to as self-driving, represents a significant advancement in transportation technology. It encompasses a wide range of vehicle automation levels, from basic driver assistance features like adaptive cruise control to fully automated systems capable of navigating complex environments without human intervention. Understanding these varying levels of autonomy is crucial for comprehending the current state of the technology and its potential impact on society. This technology aims to enhance safety, efficiency, and accessibility of transportation, promising a future where cars operate with minimal or no human input.
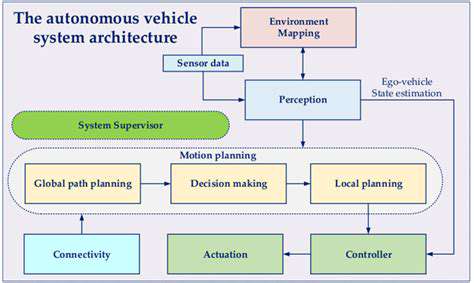
A key aspect of autonomous driving is the integration of sophisticated sensors, sophisticated algorithms, and advanced computing power. These components work together to perceive the environment, make decisions, and control the vehicle's actions. This intricate process relies on a vast amount of data, collected from various sources, to allow the vehicle to respond effectively to dynamic situations. The goal is to create a system that can reliably and safely navigate roads, considering a multitude of variables, from weather conditions to pedestrian behavior.
Levels of Autonomous Driving
Autonomous driving systems are categorized into different levels of automation, each with increasing levels of vehicle control. Level 0 signifies no automation, where the driver retains complete control. Levels 1 and 2 introduce features like adaptive cruise control and lane keeping assist, providing limited driver support. Levels 3 and 4 represent partial and conditional automation, allowing the vehicle to take over some or all driving functions in specific situations and conditions. Level 5, the ultimate goal, signifies full automation where the vehicle can handle all driving tasks in any circumstance without human intervention.
As the levels of autonomy increase, the complexity and sophistication of the systems involved also increase. This advancement requires significant breakthroughs in artificial intelligence, sensor technology, and vehicle control systems. The development and deployment of autonomous driving technology will undoubtedly require rigorous testing and validation to ensure safety and reliability.
Challenges and Opportunities
Implementing autonomous driving technology presents numerous challenges, including the need for robust and reliable sensors, advanced algorithms, and robust safety systems. Ensuring the safety and reliability of autonomous vehicles in various conditions, including extreme weather, complex traffic situations, and unexpected events, is of paramount importance. Ethical considerations, such as how the vehicle should respond in unavoidable accidents, also need careful consideration. Addressing these challenges is crucial for the widespread adoption of autonomous vehicles.
Despite the challenges, the potential benefits of autonomous driving are substantial. Improved safety, reduced traffic congestion, and increased efficiency are among the key advantages. Autonomous driving could potentially revolutionize transportation, opening up new opportunities for people with disabilities and enhancing accessibility for a wider range of users. The technology also has the potential to significantly reduce carbon emissions and improve traffic flow, leading to a more sustainable future.
Future Implications of Autonomous Driving
The future implications of autonomous driving are far-reaching and multifaceted. The technology has the potential to transform various industries, including transportation, logistics, and manufacturing. It could create new job opportunities in areas like autonomous vehicle maintenance and software development. However, it also raises concerns regarding the potential displacement of existing jobs in the transportation sector. The long-term impact on urban planning, infrastructure development, and societal structures warrants careful consideration.
The development and integration of autonomous driving technology will undoubtedly have a profound effect on how we live and work. The ability to travel safely and efficiently without human intervention will lead to a paradigm shift in how we move around. Adapting to this new reality will require careful planning and consideration of the diverse implications for individuals and communities.
Sensor Fusion and Data Integration
Sensor Fusion Techniques for Autonomous Vehicles
Sensor fusion is a crucial component of autonomous driving algorithms, enabling vehicles to perceive their surroundings comprehensively. It involves combining data from various sensors, such as cameras, LiDAR, radar, and IMUs, to create a more accurate and robust representation of the environment. This integrated data allows for a more complete understanding of objects' positions, velocities, and trajectories, which is vital for safe and reliable navigation. Sophisticated algorithms are employed to seamlessly merge these different sensor inputs, mitigating the limitations of individual sensors and enhancing the overall perception system.
Different sensor fusion approaches exist, each with its own strengths and weaknesses. For example, Kalman filtering is a common technique used to estimate the state of a vehicle and its surroundings, providing a unified representation of the environment from multiple sensors. Other methods, such as Bayesian networks, can be utilized for more complex scenarios, allowing for the incorporation of prior knowledge and probabilistic reasoning into the fusion process. Accurate sensor fusion is essential for autonomous vehicles to make informed decisions and react appropriately to dynamic situations on the road.
Data Integration for Enhanced Perception
Data integration extends beyond sensor fusion, encompassing the broader process of combining data from various sources to improve the overall perception of the vehicle's environment. This includes integrating data from external sources, such as map data, traffic information, and weather forecasts. Integrating these external data sources into the perception system is crucial for creating a holistic understanding of the environment, enabling the vehicle to anticipate potential hazards and react to them proactively.
The integration of structured data, like high-resolution maps, can significantly improve the accuracy and reliability of the autonomous driving system. These maps provide a detailed representation of the road network, including lane markings, traffic signals, and other relevant infrastructure. The combination of real-time sensor data with map data allows for a more comprehensive understanding of the vehicle's surroundings, enhancing the vehicle's ability to navigate complex environments and make precise decisions.
Challenges in Sensor Fusion and Data Integration
Despite the significant advancements, sensor fusion and data integration present various challenges. One key challenge is ensuring data consistency and accuracy across different sensor types. Variations in sensor calibration, noise levels, and data rates can lead to inconsistencies in the fused data, potentially impacting the vehicle's decision-making process. Developing robust algorithms to handle these variations and ensure reliable data integration is crucial for the development of safe and reliable autonomous vehicles.
Another significant challenge is the computational complexity associated with processing and integrating large volumes of data from multiple sensors. Real-time processing is essential for autonomous vehicles to respond quickly to changing situations on the road. Efficient algorithms and powerful computing platforms are necessary to manage the computational demands of sensor fusion and data integration in real-world applications. Furthermore, the need for seamless integration with existing infrastructure and data sources is critical for successful implementation.
Real-World Applications and Case Studies
Sensor fusion and data integration are currently being used in various real-world autonomous driving applications, including self-driving cars, trucks, and delivery robots. The successful integration of sensor data from cameras, LiDAR, and radar systems has resulted in significant improvements in perception and decision-making capabilities. Numerous case studies demonstrate the effectiveness of these techniques in various challenging driving scenarios, showcasing the potential of autonomous vehicles to navigate complex environments safely and efficiently.
Recent advancements in deep learning algorithms have further enhanced the performance of sensor fusion and data integration. Deep neural networks can learn complex relationships between sensor data and driving scenarios, improving the accuracy and robustness of the perception system. This advancement has the potential to revolutionize the field of autonomous driving, paving the way for more reliable and sophisticated self-driving systems.
Future Directions and Research Opportunities
Future research in sensor fusion and data integration for autonomous driving algorithms will likely focus on developing more sophisticated and robust algorithms to handle complex and dynamic scenarios. Advancements in sensor technology, including the development of more accurate and reliable sensors, will contribute to the overall improvement of the perception system. The integration of more advanced data sources, such as high-definition maps and cloud-based traffic data, will further enhance the vehicle's ability to anticipate potential hazards and react accordingly.
Research into developing more efficient and scalable algorithms for real-time processing of large volumes of sensor data is also crucial. This will enable autonomous vehicles to handle complex scenarios and make timely decisions in dynamic environments. Addressing ethical considerations associated with sensor fusion and data integration will be another critical area of research to ensure responsible and safe autonomous driving practices.